丹佛斯运动控制器在远程伺服控制中的应用
发布时间:2019-08-02 16:20:33来源:
一、 Epsilon SWB发泡模机运动控制要求:
但是如果使用异步伺服电机,用一台伺服驱动器同时驱动两台电机,利用异步电机的固有特性,可以方便地实现转速同步,并且转矩输出一致。右图为此种运行模式时两台电机的输出转矩,可见输出转矩的不平衡是由于电机的转矩-转差特性不同造成的,这个问题可以用选择相同厂家相同型号电机的办法解决,而且比较好是选额定转差比较大的异步电机。 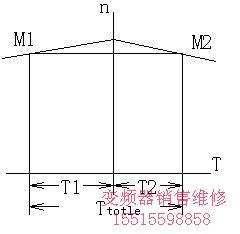
| 图三、机械抱闸控制时序图 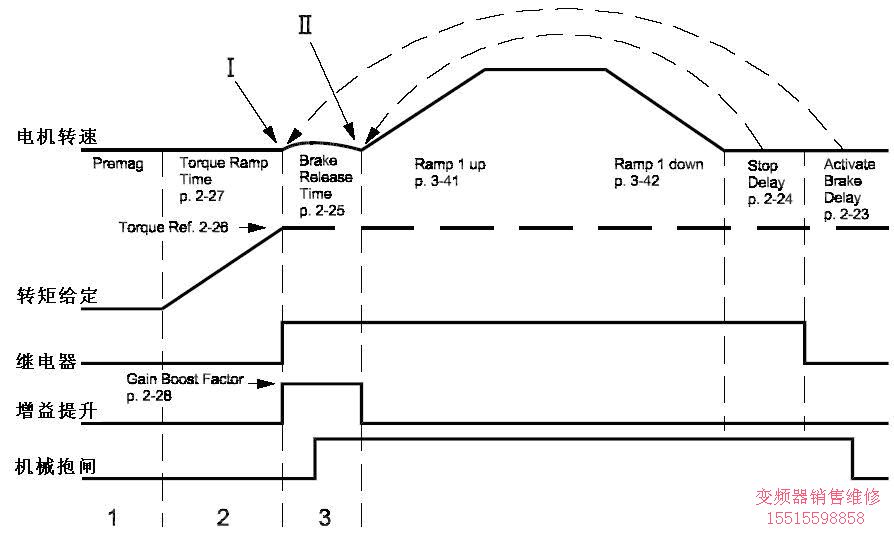 |
| 机械角度 |
| 电机角位移 |
| 图四、电机角位移-机械翻转角度关系图 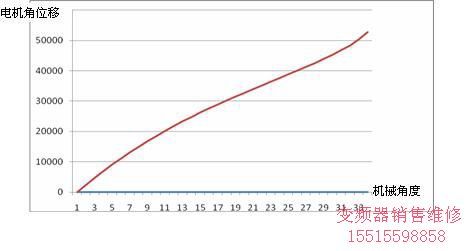 |
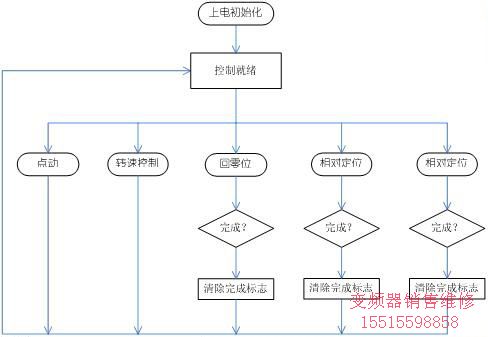
二、 运动控制的高速总线通讯接口程序编制和定义:
| | PCD1 | PCD2 | PCD3 | PCD4 |
| 写入 | 控制字 | 速度给定 | 位置给定 | 转矩给定 |
| 读出 | 状态字 | 当前实际速度 | 当前实际位置 | 当前实际转矩 |
| 位 | 位 = 0 | 位 = 1 |
| 0 | 自由运行 | 伺服锁定 |
| 1 | 正转 | 反转 |
| 2 | | 点动 |
| 3 | | 转速控制模式 |
| 4 | | 转矩控制模式 |
| 5 | | 相对定位控制模式 |
| 6 | | 绝对定位控制模式 |
| 7 | | 回零位 |
| 8 | | 故障复位 |
| 9 | | 动作完成标志清除 |
| 10-15 | | 保留 |
| 位 | 位 = 0 | 位 = 1 |
| 0 | 无正转限位信号 | 正转限位信号动作 |
| 1 | 无反转限位信号 | 反转限位信号动作 |
| 2 | 机械制动抱紧 | 机械制动释放 |
| 3 | 运动过程中 | 动作完成 |
| 4 | 驱动系统正常 | 驱动系统报警 |
| 5 | | 运动控制器控制就绪 |
| 6 | | 回零位完成 |
| 7-15 | | 保留 |
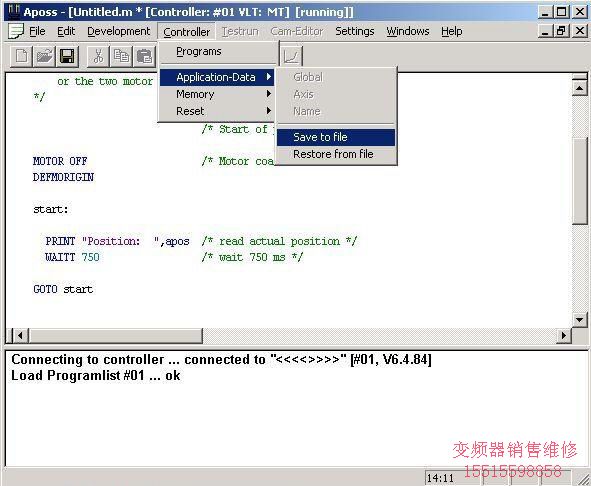
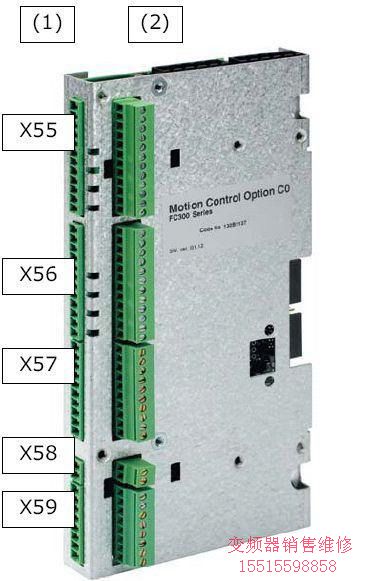
三、 丹佛斯运动控制器简介:
| 快捷功能键 |
| 编辑窗口 |
| 对话窗口 |
| 控制器编译器 通讯信息窗口 |
| 菜单功能选择 |
| 下拉式菜单 |
| 状态条,显示当前行号列号等 |
四、 主控PLC的编程办法: