台达变频器在并列式连续拉丝机上的应用
发布时间:2019-08-05 10:01:50来源:
台达变频器在并列式连续拉丝机上的应用
1 引言
拉丝机是金属线材加工中的重要设备,用于将金属原材加工成各种规格线材。拉丝机由放线、拉丝、水冷、收线及排线等部分组成,其中电气传动部份主要由放线电机,收线电机及排线电机实现,其生产质量和效率对于企业来讲至关重要。拉丝机可分为滑轮式、活套式、直线式三种。从产品终端来说,拉丝机可以分为大拉机,中拉机,小拉机,微拉机;而从拉丝机内部控制方式和结构来说,可以分为水箱式,滑轮式,直进式等主要的几种。对于不同要求,不同精度不同规格的产品,不同的金属种类,可选择不同规格的拉丝机械。对于铜铝基材的电线电缆生产企业,双变频控制的细拉机应用比较广泛,相对而言,其要求的控制性能也较低,而对于大部分钢丝生产企业,针对钢材特性,其精度要求和拉拔稳定度高,因此使用直进式拉丝机较多,不同的拉丝机械,其工作过程基本相同:
放线:l 金属丝的放线速度,对于整个拉丝机环节来说,其控制没有过高精度要求,对部分双变频控制的拉丝机械,甚至可以利用拉丝环节的丝线张力通过圆盘拉伸。对大部分拉丝机械,放线的控制是通过变频器驱动放线机实现的。
拉丝:l 拉丝环节是拉丝机比较为重要的环节。不同金属物料,不同的产品精度和要求,拉丝环节有很大的不同,双变频控制拉丝机拉丝部分与放线部分共用一台电机,金属丝通过内部塔轮的导引,经过模具而逐步拉伸。而直进式拉丝机拉伸效率较高,对每一道拉丝工序,都需要一台电机带动,因此其控制也比较为复杂。(欢迎来电咨询 河南广润自动化设备有限公司 网址:www.appwarp.com 手机:15515598858 )
收线:l 收线环节的工作速度决定了整个拉丝机械的生产效率。
2并列式连续拉丝机结构
并列式连续拉丝机是一种用于拉拔金属线材的直进式连续拉丝机,将组成一台或两台连续拉丝机的所有单拉丝机按2~4列并排分布并以水平形式同时安置在一个带有垂直平面的机架上,将所有的模盒装置也设在机架上并使之与水平面成一定夹角,产品具有占地少、有利于提高劳动生产率及实现卫生和文明化生产。
本文以西安某公司生产的并列式拉丝机为设计案例。并列式连续拉丝机是平行排列成2-4列的直进式连续拉丝机,其传动、润滑、冷却及控制与直立直进式拉丝机相同。整机外观图示如图1所示。

图1 并列式拉丝机
本机器共有10个塔轮,1个牵引轮,1个收卷轮,11个模具,以及11根摆杆,比较大进线直径2.4mm,比较小出线直径0.3mm,比较高线速度2.5m/s。塔轮直径均为250mm,牵引轮直径为360mm,收卷轮比较小直径为280mm。原料线材通过11个模具的11级拉伸,变成需要线径的成品线材。每个塔轮由1台电机控制,牵引轮和收卷轮也分别由1台电机控制。每台塔轮配置摆杆一根,作为恒张力控制时使用。每台电机都通过减速机与机械连接,减速比如下表1所示(减速比G为负载侧齿轮/电机侧齿轮)。整机结构示意图如图2所示。
表1 减速机减速比
对应电机位置 | 减速比G | 对应电机位置 | 减速比G |
塔轮1 | 19.71 | 塔轮7 | 10.47 |
塔轮2 | 17.11 | 塔轮8 | 9.85 |
塔轮3 | 15.62 | 塔轮9 | 8.73 |
塔轮4 | 14.55 | 塔轮10 | 7.67 |
塔轮5 | 12.69 | 牵引轮 | 10.47 |
塔轮6 | 11.89 | 收卷轮 | 9.27 |
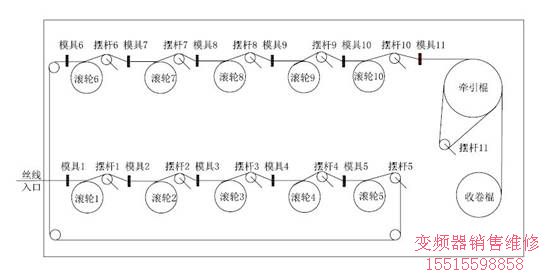
图2 整机结构示意
3 基于台达BW系列变频器的并列式拉丝机
3.1 控制原理(欢迎来电咨询 河南广润自动化设备有限公司 网址:www.appwarp.com 手机:15515598858 )
并列式拉丝机的变频恒张力驱动目的是为了保证在运行过程中丝线的张力恒定。根据机械结构和材料的不同,恒张力控制的方法一般分为两种:1直接控制电机输出转矩,2通过控制速度恒定来保证张力的恒定。通过对机械结构的分析,本项目采用通过控制速度的方法来间接控制张力的恒定。
由于并列式拉丝机由11组牵伸机构和1组收卷机构组成,所以我们单独对一组牵伸机构和一组收卷机构来进行控制原理的分析。图3为一组牵伸机构的结构示意图。
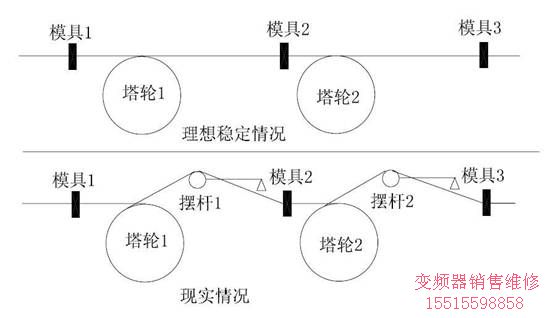
图3 牵伸机构的结构
在运行过程中保证摆杆处于设定的平衡位置不出现波动,就可以认定牵伸过程中丝线上的张力是恒定的。所以我们可以将其控制分为两个过程来进行:稳定过程和自调节过程。
稳定运行过程中,我们将条件理想化(排除其他不稳定因素的影响),摆杆将停在设定的位置不出现波动,塔轮只需要按照计算出来的理论线速度运行就可以保证丝线张力恒定,此过程只需要知道每级牵伸机构中塔轮的理论线速度即可;由于机械一旦制造完成,塔轮的直径以及电机端的减速比就已经确定,从塔轮的理论线速度就可以计算出电机的实际运行转速,也就是变频器需要运行的频率。
在运行过程中会出现很多的不稳定因素,例如丝线的打滑,机械摩擦力变化等原因,摆杆不可能固定不动,于是就需要变频器对摆杆的变化做出响应,通过速度的变化来达到让摆杆稳定的目的,这个就是自调节的过程。通过变频器对摆杆信号进行PID的运算,就可以达到这个目的。图4为牵引驱动机构参数的详细示意图,让我们看看图中变量之间的关系。
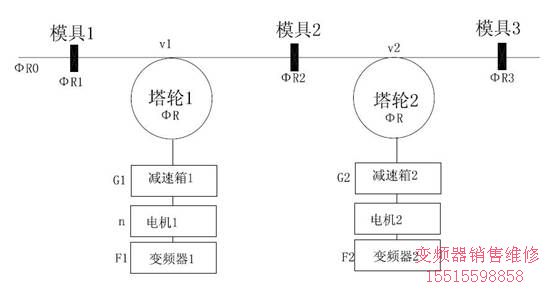
图4 牵引驱动参数
图4中假设塔轮直径为R,模具1直径为R1,模具2直径为R2,模具3直径为R3,进线直径为R0,电机1减速齿轮比为G1,电机2减速齿轮比为G2,变频器1指令频率为F1,变频器2指令频率为F2,塔轮1上的线速度为v1,塔轮2上线速度为v2,n为电机1转速,s为电机1转差率,p为电机1级对数,t为时间。G1定义为(负载侧齿轮10-24/电机侧齿轮10-23)。
牵伸机构中,由于模具大小不一样,根据单位时间内通过模具的材料体积相等的前提条件,
我们知道:(R1/2)² *π *v1 *t = (R2/2)² *π * v2 *t
R1² * v1 = R2² * v2 …………………………①
由于R1,R2已知,根据v1就可以计算出v2。
而 v1 = π * R * n / G1, n = F1 * 60 * (1-s) / p
v1 = π * R * F1 * 60 * (1-s) / (G1 * p)
F1 = G1 * p * v1 / (60 * π * R * (1-s)) …………………………②
通过以上①②公式,就可以计算出每一级牵伸的理论线速度和理论频率。
图5为收卷机构的结构示意图。
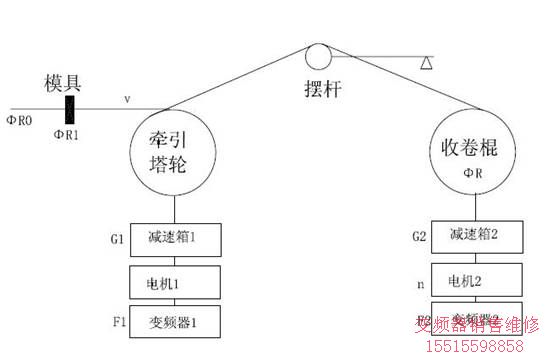
图5 收卷机构的结构示意
收卷机构的控制原理与牵伸机构有两点不同:1收卷机构与牵引机构的线速度是同一的;2收卷机构中收卷棍的卷径是会随着电机运转而发生变化的,牵伸机构中的卷径是固定的。所以对于控制收卷棍的变频器,还需要将R的变化考虑进去,时时更新R值。原理公式同上式②。